Xiang ZhuI am a second-year Ph.D. student (successive postgraduate and doctoral programs) at the Institute for Interdisciplinary Information Sciences, Tsinghua University, advised by Prof. Jianyu Chen. Prior to that, I received my Bachelor's degree from the School of Automation, Beijing University of Posts and Telecommunications. |
|
ResearchI'm interested in robotics, embodied AI. Recently, my research interests have primarily focused on dexterous manipulation, bimanual manipulation, and humanoid robot manipulation. I am particularly interested in learning from human data or leveraging human data for boosting performance. (*: Equal contribution. Co-first Author.) |
|
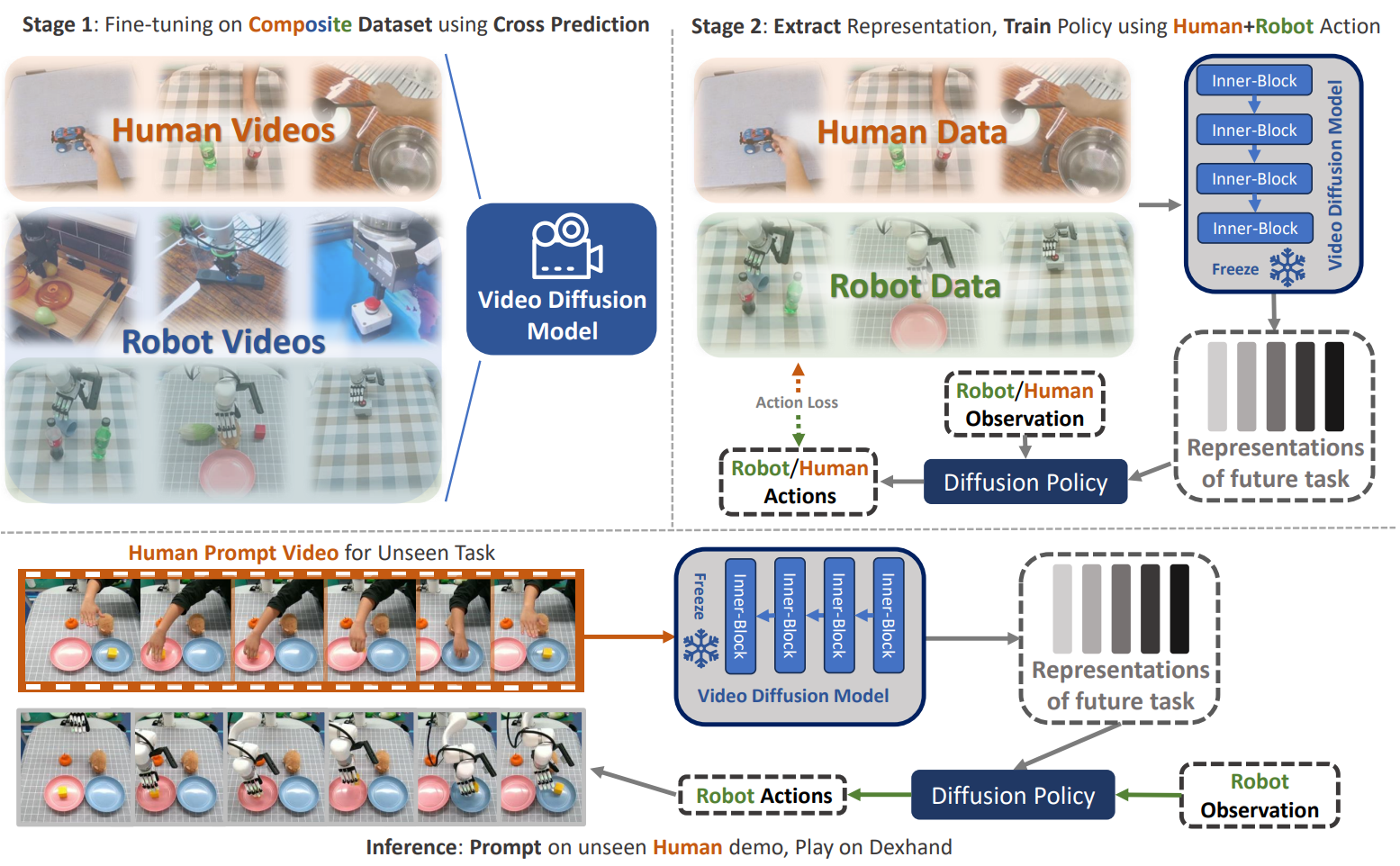
Learning Generalizable Robot Policy with Human Demonstration Video as a Prompt Xiang Zhu, Yichen Liu, Hezhong Li, Jianyu ChenarXiv preprint, 2025 pdf / |
|
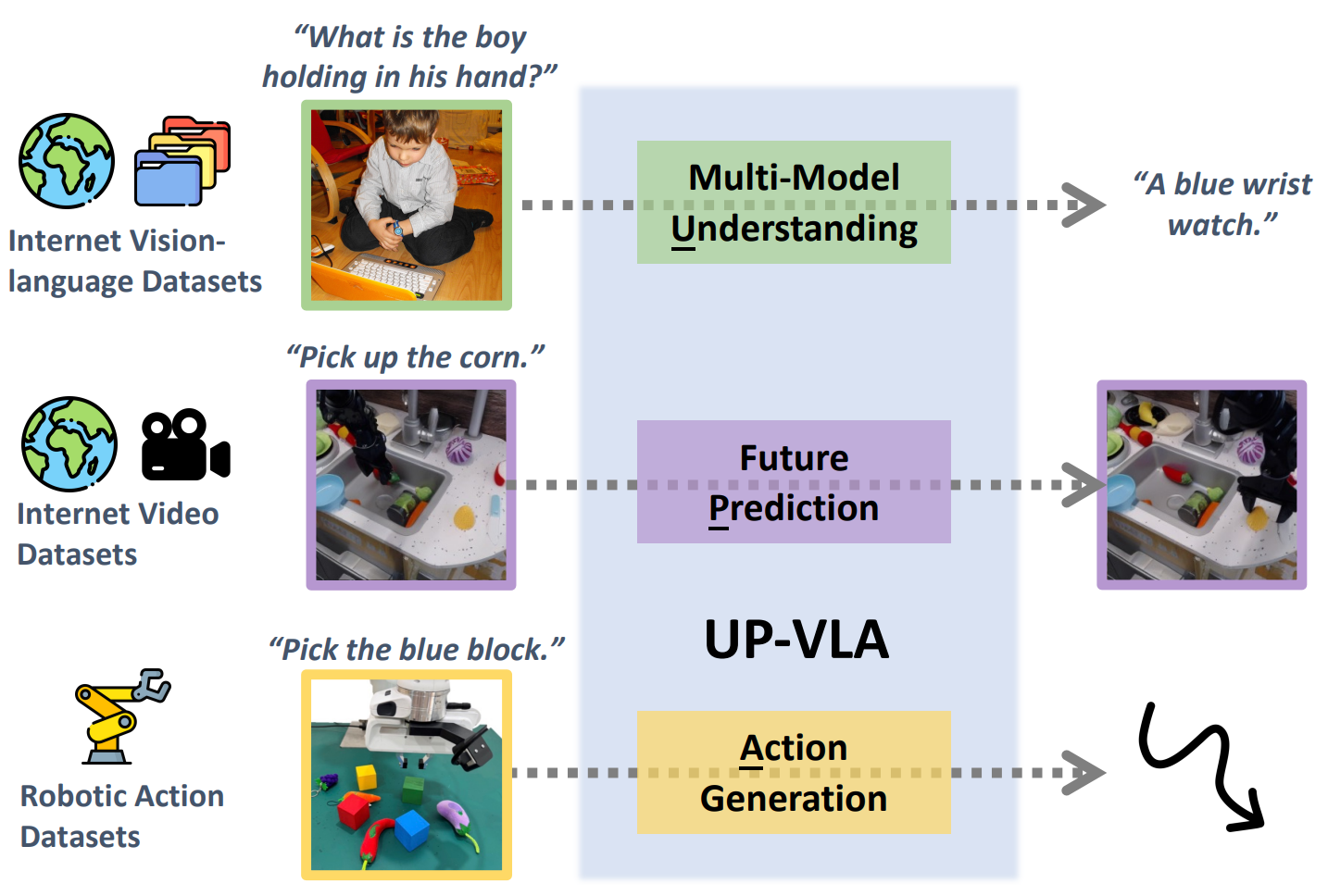
UP-VLA: A Unified Understanding and Prediction Model for Embodied Agent Jianke Zhang, Yanjiang Guo, Yucheng Hu, Xiaoyu Chen, Xiang Zhu, Jianyu ChenInternational Conference on Machine Learning(ICML), 2025 pdf / |
|
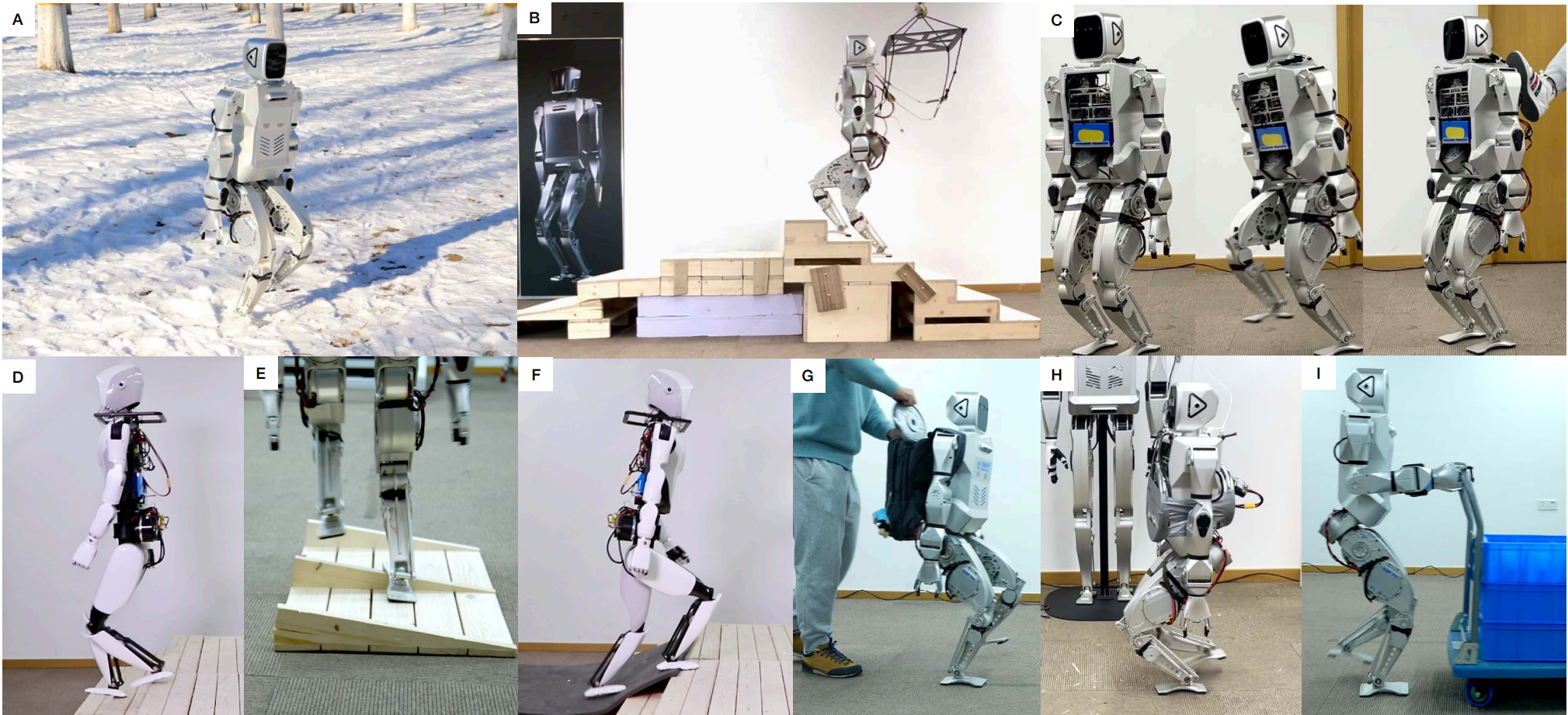
Advancing humanoid locomotion: Mastering challenging terrains with denoising world model learning Xinyang Gu*, Yen-Jen Wang*, Xiang Zhu*, Chengming Shi*, Yanjiang Guo, Yichen Liu, Jianyu ChenRobotics: Science and Systems (RSS), 2024 pdf / code / Best Paper Award Finalists. |
|
A Contact-Safe Reinforcement Learning Framework for Contact-Rich Robot Manipulation Xiang Zhu, Zixuan Chen, Jianyu ChenarXiv preprint, 2023 pdf / |

|
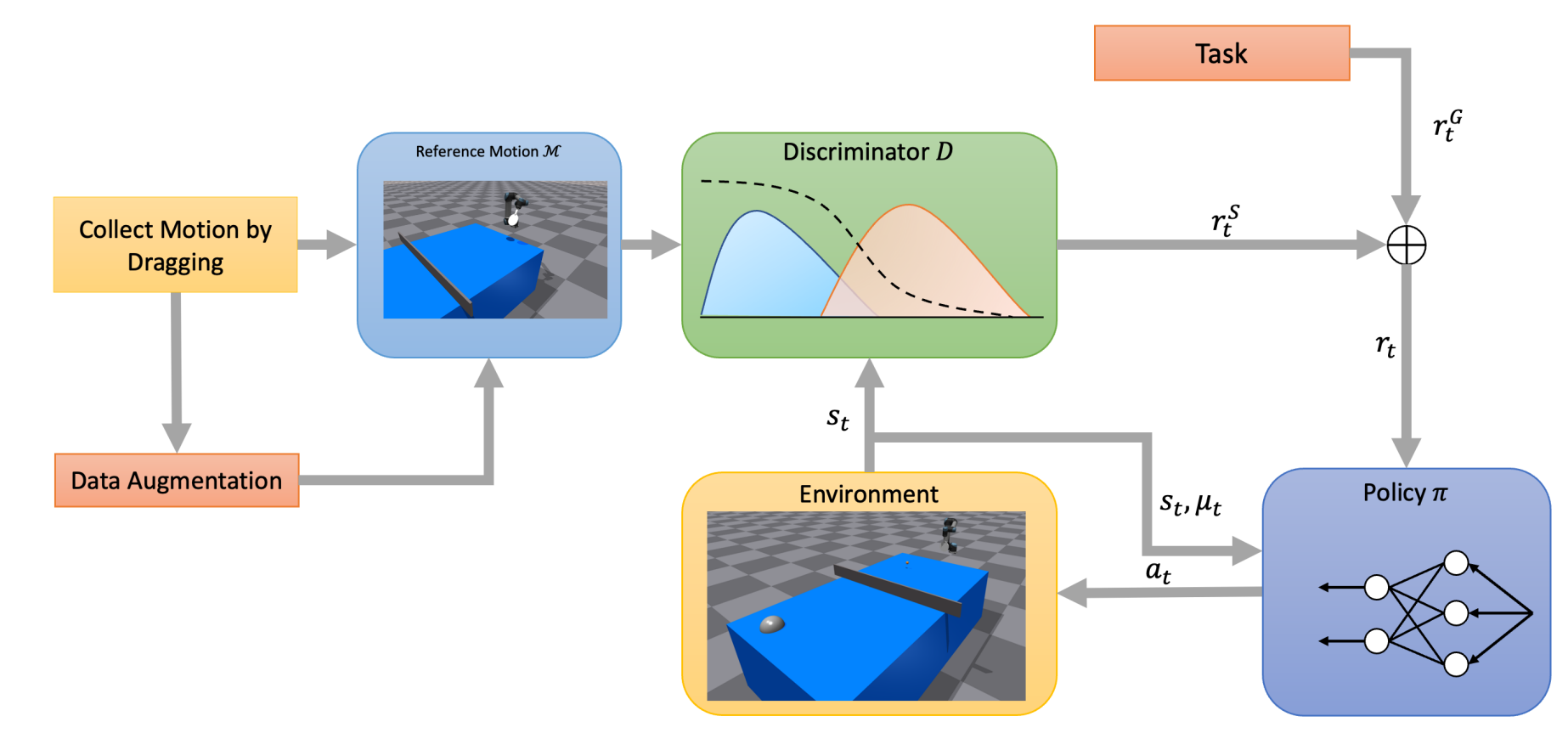
Stylized table tennis robots skill learning with incomplete human demonstrations Xiang Zhu, Shucheng Kang, Jianyu ChenInternational Conference on Intelligent Robots and Systems (IROS), 2022 pdf / |
|
Design and source code from Jon Barron's website |